When you scan an object, a point cloud is generated of the object in space. This point cloud is often converted into a mesh using a process known as mesh reconstruction. The mesh can then be textured, retopologised, and so on.
The mesh reconstruction process often uses one of a few famous algorithms out there. One example is Poisson mesh reconstruction, I believe originally developed at Microsoft, which looks at the normals or orientations of each of the points in the point cloud. These normals help it determine the boundary between outside the scanned object and inside the scanned object. The boundary is then converted into an interpolated surface, which forms the new mesh.
The Poisson reconstruction algorithm isn't always the best choice. For example, when you don't know the orientations of the points, and it is not easy to derive it, then Poisson wouldn't fare too well. If you also have lots of thin shapes, such as leaves on a tree, Poisson will struggle. But that's ok, since there are other algorithms out there, each with their pros and cons.

In 2015, I dealt with the issue of having to reconstruct meshes from extremely sparse or poor scans with holes. I'd like to share that there is a another approach to mesh reconstruction using metaballs. I haven't seen others use this method, so I thought I'd share it here.
Metaballs define a surface usually based on the distance from the centroid of each point. Each point represents a blob-like sphere, and when you get points close to each other, just as water droplets would join one another, these blobs would coalesce into a form.
Therefore, if you convert each point in a point cloud into a metaball and adjust its threshold to overlap with the average density of the scan, you can convert your scan into a very blobby mesh. This type of reconstruction works well on thin shapes, but does not attempt to patch or interpolate over any holes in the scan (which can be good if your scan is particularly bad or misleading). It also does not need to consider the entire point set at once or bother with point orientation. With this technique, it is possible to reconstruct in batches or zones and then stitch the results together.
Let's see an example, on a particularly nasty photogrammetry dataset where some parts were very well scanned and other parts were very badly scanned, with a relatively sparse point cloud.
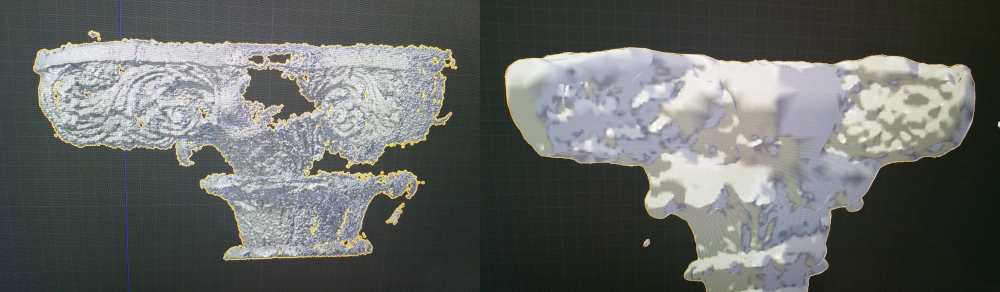
If you want to try your own reconstruction, you can test this reconstruction very easily with Blender. Blender supports metaballs out of the box. Simply create a metaball, and set it to be the duplivert object of a point cloud. No coding skills required and no proprietary software needed.
Let's see another reconstruction with the Stanford bunny. If you want to recreate this, you will first need to reorientate the source point cloud of the Stanford bunny.
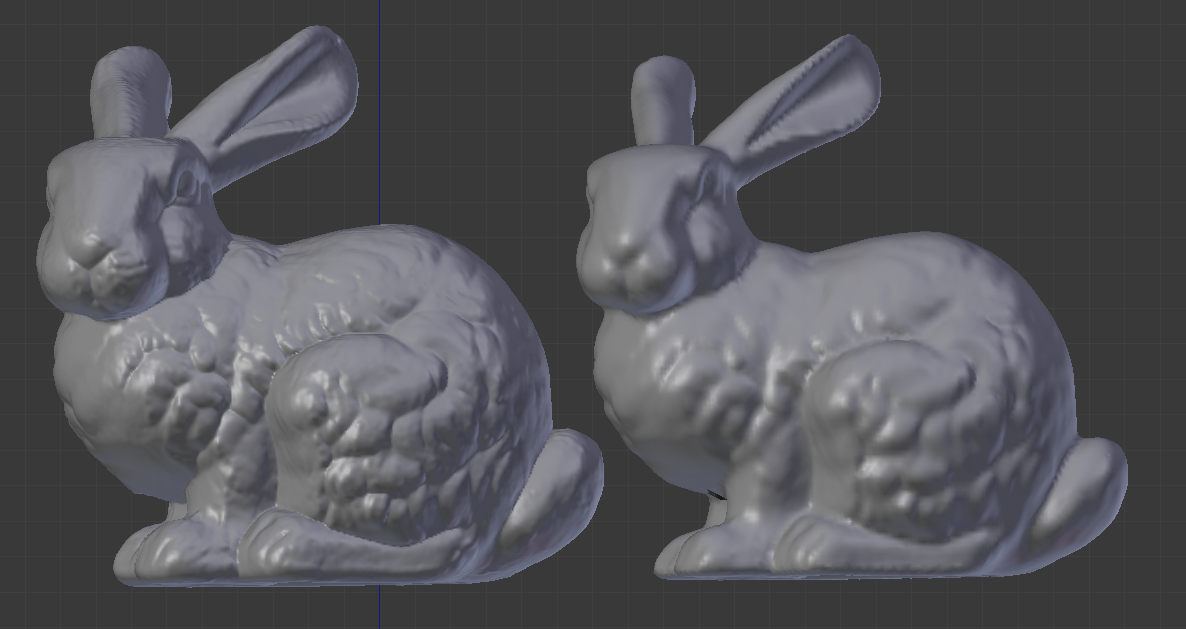
On the left is the metaball reconstruction, and on the right is the zipper high resolution reconstruction provided by Stanford (with normals smoothed). As you can see, the metaball reconstruction results in a pretty detailed mesh. You can also see artifacts of blobbiness and the bunny on the left is marginally fatter due to the metaball radius.
Happy scanning! If you are aware of research with this technique, please send me an email and I'd love to hear about it.