Hardware isn't generally my thing. When it comes to software, I like to break and create. But in my opinion, hardware should just work. But even though that's another story altogether, it did explain my apprehension when I greeted the UPS guy one morning delivering a BeagleBone Black.
Let's begin with the BBB. It's a computer the size of a credit card, which isn't that impressive if you realise that your phone is a computer. I find the best way to explain it is in terms of two other products, the Arduino and the Raspberry Pi. The Arduino is a similarly sized (comes in multiple sizes though) controller where you can upload scripts, plug in a hardware circuit (wires and lightbulb, that sort of thing), and have it control the circuit. Despite its power in hardware control, it only has a small scripting interface for you to do your programming. The Raspberry Pi is the opposite. It's a full Linux computer (based off Debian), but does not have proper hardware controls out of the box. The BBB provides the best of both worlds: a full Linux system (Angstrom Linux, but of course you can flash your own), and a ridiculous number of IO pins to control circuits. All this awesome power at 45USD.
The next step upon receiving this wonderboard was obvious. Let's build a swarm of robots. Along with two university friends, Lawrence Huang and Gloria Nam, we set out planning the system.
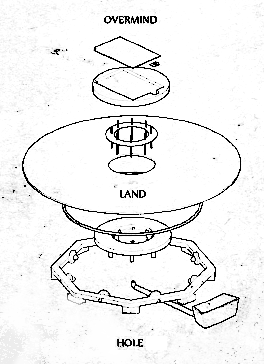
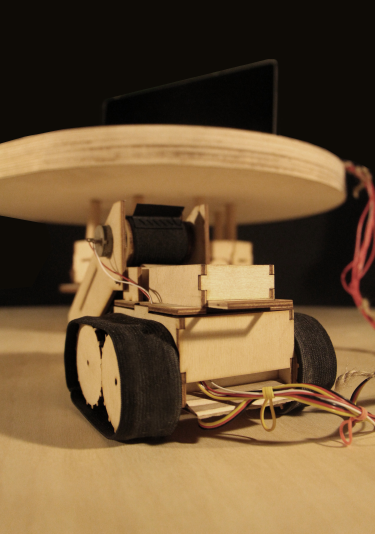
The base was to be constructed out of a 1200x1200mm wooden plywood board and cut it into a circle with a hole in the middle. This would be the "world" where the robot swarm would live on. This world would operate like a Lazy Susan, and would have a two depots filled with some sort of resource. One at the center, and one at the perimeter. This gave the colony a purpose: it would need to collect resources. Above the board was where we would put the computer, BBB, power supply, and cables to hook up to all the bots below.
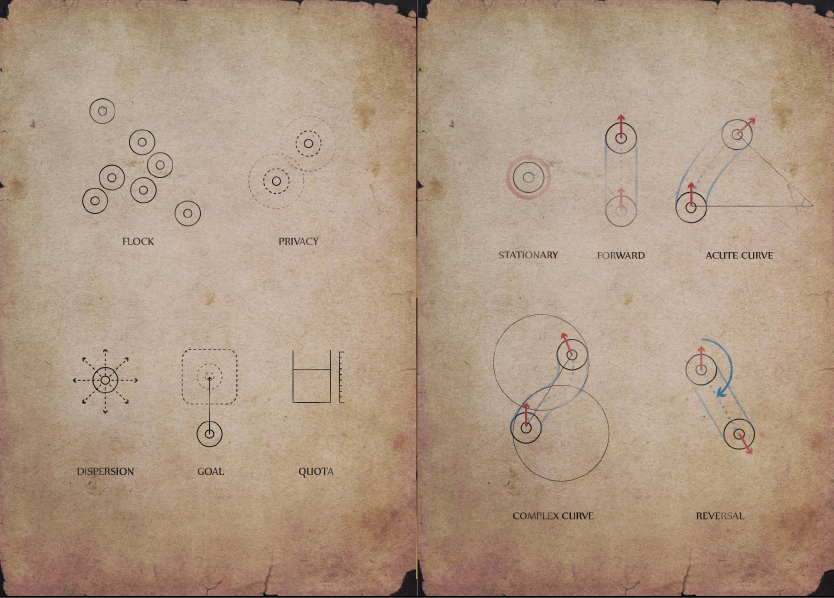
We then had to determine the behavior and movement capabilities of the swarm. It had to act as one, but still remain separate entities. It also had to disperse to discover where the rotated resource depots were, and the swarm as a whole had a set of goals and quota limitations. Five movement types (along with the math) were worked out to allow the bots smooth and flexible movement across the terrain.
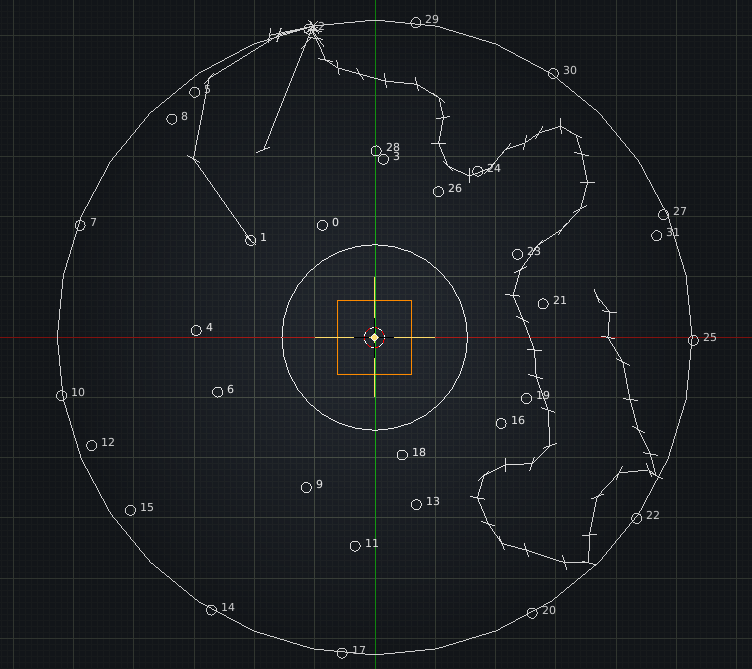
The overmind was next. We would use Blender's very flexible boid simulator along with custom Python scripts using Blender's Python API to simulate the swarm behavior on the computer and set swarm goals. At the same time, a real-time top-down view could be generated and displayed. Due to budget reasons, we couldn't build the entire swarm of robots, but instead settled on building just one bot in the swarm, and having this bot track the motions of a single bot on the computer screen, but still behave as part of the full 32-robot swarm on the screen. Viewers could then see on the screen the full swarm behavior, and physically see a single bots behavior in front of them.
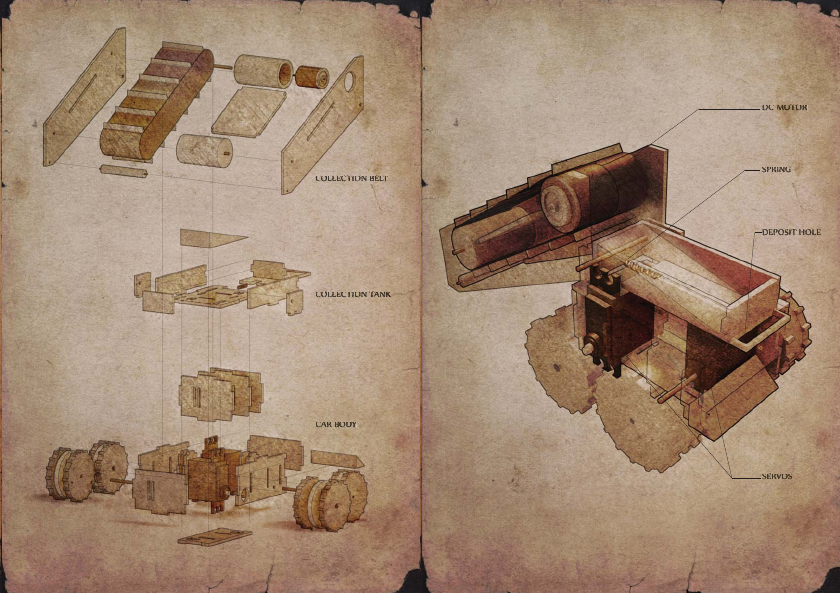
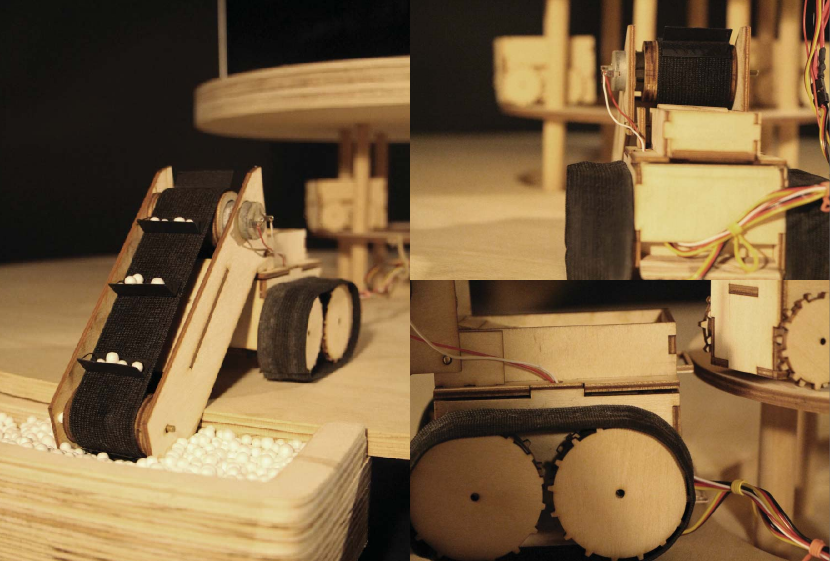
The car itself was then built. It was relatively small and was barely enough to fit the two continuous-rotation servo motors that were required to power its left and right treads. It had a little tank on its top to hold resources, a depositing mechanism at its front, and dragged along a massive conveyor belt to collect resources behind it.
Now the fun part - calibrating the simulated swarm with the actual physical swarm behavior, and doing all the physical PWM circuits. Many sleepless nights later it was a success. Here we see the bot doing a weird parking job into the depot and collecting resources, going back to the center, and depositing it. Apologies for the lack of video.
And there we have it. A swarm of robots. Did it curb my fear of hardware? Not entirely.
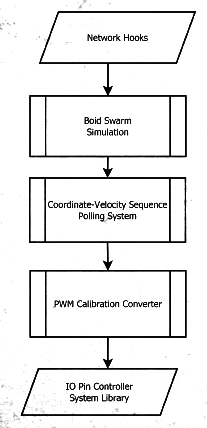
For those interested in the actual system, here's a macro overview:
A few extra fun things from the project:
- Calibration was not easy. Actually, it was very hard. No, it was stupidly hard. It was ridiculously hard. Real life has so many uncertainties.
- Each bot is tethered to the overmind via 8 wires (3 per tread, 2 for conveyor belt). Could it be made into a wireless swarm? Yes. Did we have the money? No.
- Could it be modified to move in 3D XYZ space like a swarm of helicopters? Yes. Would I do the math for it? No.
- The actual simulation was done on the computer via Blender + custom python scripts. The computer was then connected via a persistent master SSH connection, which was reused to send simple signals to the pin's embedded controller. So all in all the BBB actually didn't do much work. It was just a software to hardware adapter.
- Because the computer was doing all the work, it wasn't hard to add network hooks. This meant we could actually control the system via our phones (which we did).
- Weirdest bug? When (and only when) we connected the computer to the university wifi, flicking a switch 10 meters away in a completely separate circuit (seriously, completely separate) would cause the BBB to die. Still completely confused and will accept any explanation.
- Timeframe for the project? 4 weeks along with other obligations.
- Prior hardware and circuit experience: none. Well. Hooking up a lightbulb to a battery. Or something like that.
- Casualties included at least three bot prototypes, a motor, and at least 50 Styrofoam rabbits
- Why are all these diagrams on weird old paper backgrounds? Why not?
- At the time of the project, the BBB was less than a month old. This meant practically no documentation, and lack of coherent support in their IRC channels. As expected, this was hardly a good thing.
Project success. I hope you enjoyed it too :)